

DDS中的基本结构是Domain,Domain将各个应用程序绑定在一起进行通信,回忆下之前我们配置通信的时候,配置的那个DOMAIN ID,就是对全局数据空间的分组定义,只有处于同一个DOMAIN小组中的节点才能互相通信。这样做才能够避免无用数据占用的资源。
QoS是一种网络传输策略,应用程序指定所需要的网络传输质量行为,QoS服务实现这种行为要求,尽可能地实现用户对通信质量的需求,能够理解为数据提供者和接收者之间的合约。
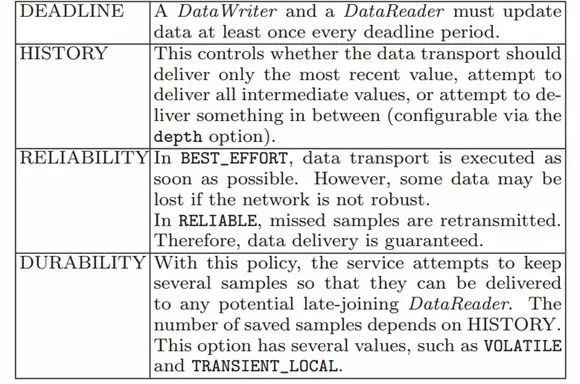
RELIABILITY策略,表示数据通信的模式,配置成BEST_EFFORT,就是尽力传输模式,网络情况不好的时候,也要保证数据流畅,此时有几率会使数据丢失,配置成RELIABLE,就是可信赖模式,可以在通信中尽量保证图像的完整性,我们大家可以根据应用功能场景选择正真适合的通信模式;
DURABILITY策略,可以配置针对晚加入的节点,也保证有一定的历史数据发送过去,可以让新节点快速适应系统。
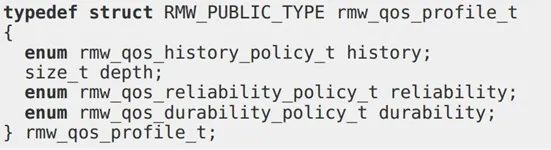
所有这些策略在ROS系统中都能够最终靠类似这样的结构体配置,如果不配置的话,系统也会使用默认的参数。
比如我们遥控一个无人机航拍,如果网络情况不好的话,遥控器向无人机发送运动指令的过程,可以用reliable通信模式,保证每一个命令都可以顺利发送给无人机,但是可能会出现一些延时,无人机传输图像的过程可以用best effort模式,保证视频的流畅性,但是可能会出现掉帧。
如果此时出现一个黑客黑入我们的网络,也没关系,我们大家可以给ROS2的通信数据来进行加密,黑客也没有很好的方法直接控制无人机。
DDS的加入,让ROS2的通信系统焕然一新,多众多样的通信配置,可以越来越好的满足不同场景下的机器人应用。
包,将控制命令传给STM32,并将接收到的数据作为线接收数据并将姿态数据传回给
(Robot Operating System)是一个适用于机器人的开源的元操作
-XRCE(资源极端受限环境的数据分发服务),推动工业终端实现智能化。
包,将控制命令传给STM32,并将接收到的数据作为线接收数据并将姿态数据传回给
的灵魂所在,它包括数据处理,进程运行,消息传递等** 。这篇文章主要介绍
方式及相关概念 /
2中的应用 /
2: 参与者(DomainParticipant):一个参与者Participant就是一个容器,对应于一个使用
模型 /
【书籍评测活动NO.33】做了50年软件开发,总结出60条经验教训,每一条都太扎心!

扫一扫 了解更多